
Elektromagnete
Definition
Elektromagnet ist der allgemeine Überbegriff für alle Arten elektromagnetischer Aktoren.
Das Wichtigste in Kürze
Das elektromagnetische Wirkprinzip eignet sich im Besonderen um kleine Hübe, schnell, mit großer Kraft und geringem Aufwand in Bezug auf Ansteuerung und mechanischer Integration zu realisieren.
Elektromagnete erzeugen mittels einer stromdurchflossenen Spule ein Magnetfeld, das durch Eisenteile an einen Luftspalt geführt wird, wo sich magnetische Pole mit Anziehungskraft, der sogenannten Magnetkraft ausbilden.
Die Magnetkraft ist regelbar durch Steuerung des Spulenstroms und wird genutzt für lineare oder rotatorische Bewegungen sowie zum Halten oder Bremsen von Bauteilen insbesondere aber oft als Antrieb von Magnetventilen
Wichtige mechanische Kenngrößen sind Magnetkraft, Hubkraft, Haltekraft und Hubarbeit. Die Kraft-Hub-Kennlinie kann fallend, waagerecht oder ansteigend sein.
Elektrische Kenngrößen von Elektromagneten sind Nennspannung oder Grenzstrom, Einschaltdauer, Bemessungsstrom, Prüfstrom und Nennleistung.
Wie funktionieren Elektromagnete?
Grundsätzlich sind Elektromagnete Geräte, die mittels einer stromdurchflossenen Spule ein Magnetfeld erzeugen und dieses durch geeignete Eisenteile an einen Luftspalt führen. Dort bilden sich magnetische Pole aus, zwischen denen eine magnetische Anziehungskraft, die Magnetkraft herrscht. Liegt an der Spule kein Strom an, so wird keine elektromagnetische Kraft erzeugt, wird der Spulenstrom geregelt, ist die Magnetkraft regelbar. Je nach Konstruktion der Eisenteile wird die Magnetkraft dazu genutzt, um lineare wie rotatorische Bewegungen auszuführen oder auf Bauteile Haltekräfte auszuüben und diese dadurch zu bremsen oder zu fixieren.
Inhaltsverzeichnis
Grundlagen
• Erzeugung des Magnetfeldes • Nutzung des Magnetfeldes • Magnetkraft in Abhängigkeit von Hub und Luftspalt
Mechanische Kenngrößen Hubmagnete
• Magnetkraft • Hubkraft • Haltekraft • Magnetkraft-Hub-Kennlinie • Hubarbeit • Nennhubarbeit
Elektrische Kenngrößen Elektromagnete
• Nennspannung • Spannungstoleranz • Bemessungssstrom • Prüfstrom • Nennleistung
Thermisches Verhalten und Betriebsart
• Eigenerwärmung von Elektromagneten
Arten von Elektromagneten
• Unterscheidung nach Spannungsart
• Unterscheidung nach der Bauform
• Unterscheidung nach der Art der Bewegung
• Unterscheidung nach der Regelbarkeit
Erläuterung der Gerätearten
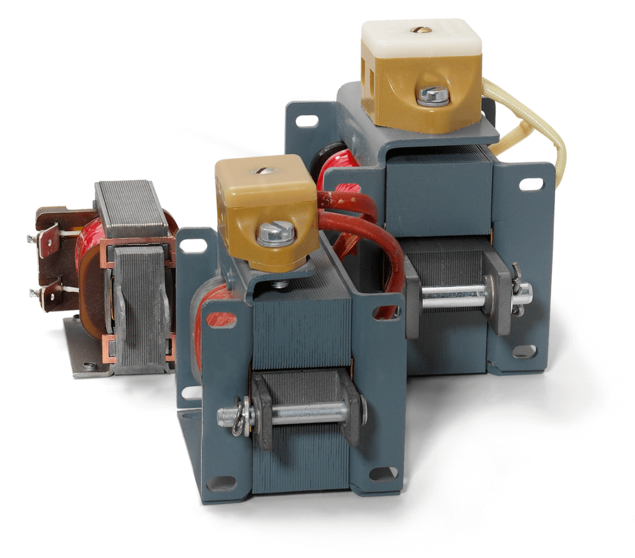
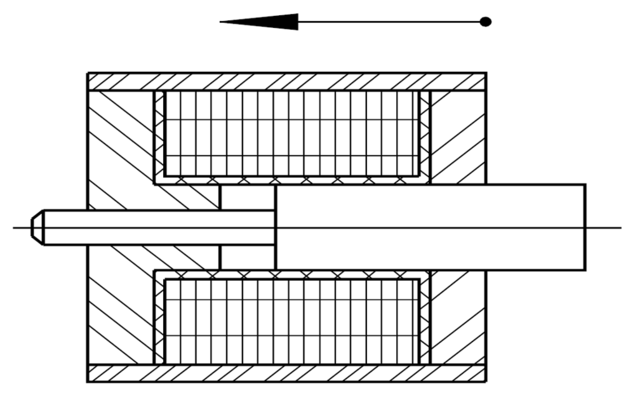
Worin besteht der Unterschied zwischen einem ziehenden oder einem drückenden Elektromagneten?
Die Unterscheidung zwischen ziehendem und drückendem Magnet ergibt sich aus den konstruktiven Möglichkeiten am bewegten Bauteil, dem Anker, anzuflanschen.
Das Bild zeigt den prinzipiellen Aufbau eines Elektromagneten, speziell eines Hubmagneten in der unbestromten Ausgangslage. Bei Bestromung bewegen sich Anker und Ankerstange in Richtung des Pfeiles.
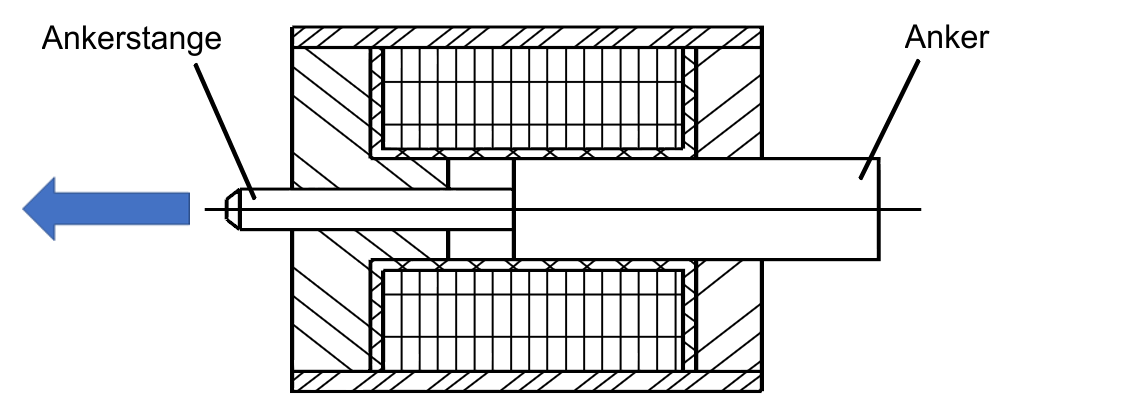
Soll der Magnet drückend eingesetzt werden, so wird an der Ankerstange angeflanscht.
Wird am Anker – gegebenenfalls auch über eine hier nicht dargestellte 2. Ankerstange angelenkt, dann ist der Magnet ziehend eingesetzt.
Produktbeispiele ziehende Elektromagnete: (G TA F, G MC X, Ventilmagnet ziehend mit Nadel)

Produktbeispiele drückende Elektromagnete: (G AA, G MC X, G SC X)

Verschiedene Bauformen können je nach Einbau sowohl als ziehende als auch als drückende Hubmagnete eingesetzt werden: (G TC A, G FC X)
Wie wird ein Elektromagnet für Gleichstrom (DC) angeschlossen ?
Das hängt von der verfügbaren Spannungsquelle ab.
An eine Gleichstromquelle wird ein Gleichstrommagnet direkt angeschlossen. Die Spannung muss der Nennspannung des Gerätes entsprechen.

Steht als Spannungsquelle Wechselspannung zur Verfügung, kann der elektrische Anschluss über einen Gleichrichter erfolgen.

Beträgt die Netzspannung 230 V, so muss der Gleichstrommagnet bei Verwendung von Silizium-Gleichrichtern für 205 V ausgelegt werden.
Der Elektromagnet erzeugt beim Abschalten eine Überspannung, wie lässt sich diese begrenzen?
Die Induktivität, mit der ein Gleichstrom-Hubmagnet behaftet ist, verursacht hohe Abschaltüberspannungen, die zum Durchschlagen der elektrischen Isolation oder zur Beschädigung anderer elektrischer Bauteile im Stromkreis führen können.
Die gebräuchlichste Methode zur Begrenzung der Abschaltüberspannung ist die Schutzbeschaltung durch eine Diode.
Weitere Hinweise entnehmen Sie bitte unserer Technischen Erläuterung GXX.
Von welchen Größen hängt die Kraft eines Elektromagneten ab?
Die Kraft eines Elektromagneten steht in direktem Zusammenhang mit dem durch die Spule fließenden Strom. Fließt ein höherer Strom, nimmt die Kraft des Elektromagneten zu.
Erheblichen Einfluss hat darüber hinaus die Größe des Luftspaltes bzw. die Position des Ankers.
Der Elektromagnet erwärmt sich im Dauerbetrieb. Ist das eine Fehlfunktion?
Die Eigenerwärmung eines bestromten Elektromagneten ist physikalisch bedingt und grundsätzlich keine Fehlfunktion. Fließt Strom durch die Spule des Gerätes wird die elektrische Energie aufgrund des Ohm'schen Widerstandes der Spule in Wärmeenergie umgewandelt. Dies führt zur Erwärmung des Magneten. Je nach Auslegung und Umgebungsbedingungen ergeben sich dabei beachtliche Oberflächentemperaturen. Wird ein Gerät unter falschen Bedingungen betrieben, kann die Temperatur über die zulässige Temperatur steigen, was zur Beschädigung des Gerätes führen kann. Die maximal zulässige Temperatur (Grenztemperatur) liegt zwischen 90°C und 250°C und ergibt sich konstruktiv durch die Wahl der Isolierwerkstoffe.
Weitere Hinweise entnehmen Sie bitte unserer Technischen Erläuterung GXX.
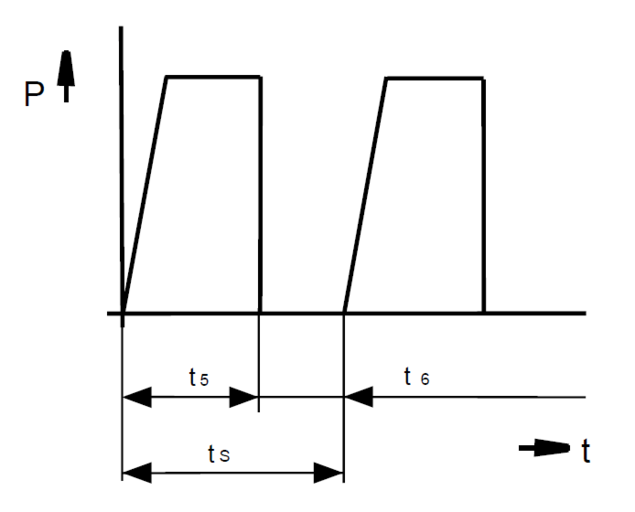
Was bedeutet der Begriff Einschaltdauer ?
Die Einschaltdauer t5 ist die Zeit in der die Versorgungsspannung am Magneten anliegt.
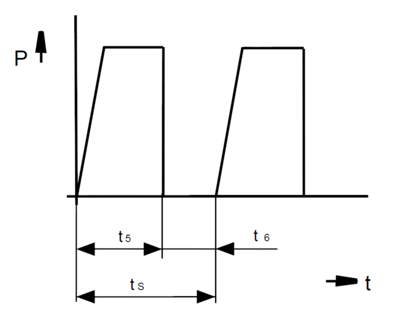
t5 = Einschaltdauer (s)
t6 = stromlose Pause (s)
tS = Spieldauer (s)
P = Leistung (W)
t = Zeit (s)
Die relative Einschaltdauer ED angegeben in %, ist das prozentuale Verhältnis von Einschaltdauer t5 zur Spieldauer tS.
Wie kann die Eigenerwärmung eines Elektromagneten reduziert werden?
Die Erwärmung eines Elektromagneten kann aus zwei Richtungen beeinflusst werden:
- Reduzierung der zugeführten Energie
oder
- Verbesserung der Wärmeableitung durch Kühlung
Zur Reduzierung der zugeführten Energie empfiehlt sich der Einsatz einer Haltestromabsenkung Z KD H 211.
In Ihren Datenblättern sind verschiedene Magnetkräfte für verschiedene Betriebsarten bzw. Einschaltdauern angegeben. Was hat es damit auf sich?
Beim Elektromagneten besteht die Möglichkeit, durch Einbau von Spulen mit unterschiedlicher Leistung die Magnetkraft zu Lasten der zulässigen Einschaltdauer zu erhöhen. Deshalb sind die Magnetkraftangaben für
Dauerbetrieb (Betriebsart S1 / relative Einschaltdauer 100%)
sowie
Aussetzbetrieb (Betriebsart S3 / relative Einschaltdauern 40% / 25 % / 15% / 5 % )
angegeben.
Untenstehend ein Ausschnitt aus einem exemplarischen Datenblatt für Hubmagnete.
Wenn Sie Magnetkraftwerte für die verschiedenen Hübe spaltenweise betrachten, sehen Sie, wie die Magnetkraft mit abnehmender Einschaltdauer zunimmt.
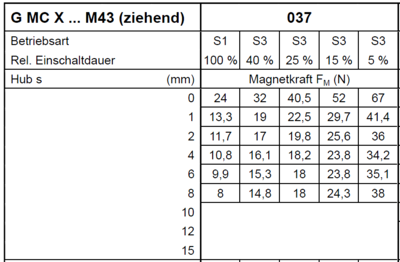
Die relative Einschaltdauer bezieht sich für Elektromagnete auf 5 Minuten (=300s)
Das heißt im konkreten Beispiel für die in der Tabelle aufgeführten Einschaltdauern:
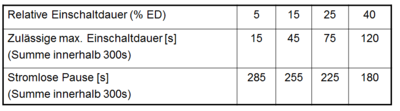
Bei mehreren Einschaltvorgängen innerhalb der 300s, werden die Einschaltdauern und stromlosen Pausen aufaddiert.
Die Kraft des eingesetzten Elektromagneten ist zu gering. Wie gehe ich vor?
Im ersten Schritt empfehlen wir zu prüfen, inwieweit die erforderliche Kraft durch Optimierung der Gesamtanwendung reduziert werden kann.
Beim Elektromagneten ist zu beachten, dass die Magnetkraft in der Regel mit zunehmendem Luftspalt / Hub abnimmt. Kann der Hub verkleinert und eventuelle Leerhübe reduziert werden, führt dies dazu, dass der Elektromagnet im Bereich der höheren Magnetkraft betrieben wird.
Grundsätzlich besteht beim Elektromagneten die Möglichkeit der Leistungssteigerung durch Reduzierung der Einschaltdauer. Dazu wird das Gerät werksseitig mit einer angepassten Wicklung ausgelegt.
Für die Lösung Ihrer Aufgabenstellung steht Ihnen Ihr zuständiges Technisches Büro gerne zur Verfügung.
Mit welcher Spannung wird ein Elektromagnet betrieben?
In der Regel wird ein Elektromagnet mit seiner Nennspannung betrieben, diese ist auf dem Typenschild zusammen mit der Betriebsart bzw. der relativen Einschaltdauer angegeben.
Die Nennspannung ist bei der Bestellung eines Elektromagneten mit anzugeben. Standardspannung und maximal mögliche Nennspannung sind jeweils in der Teilliste angegeben.
Bei Proportionalmagneten ist statt der Nennspannung der zulässige Grenzstrom IG relevant.
Ich möchte meinen Elektromagneten mit einer anderen Spannung als der Nennspannung betreiben. Ist das möglich?
Grundsätzlich sind Elektromagnete ausschließlich mit Nennspannung zu betreiben.
Wird ein Elektromagnet nicht mit seiner Nennspannung betrieben, so gelten die angegebenen technischen Daten nicht. Liegt die Spannung unterhalb der Nennspannung, werden die Kraftwerte nicht erreicht, der Magnet wird nicht voll ausgelastet. Liegt die Betriebsspannung oberhalb der Nennspannung, liefert das Gerät zwar größere Kräfte, es wird jedoch die Spule überlastet, der Magnet überhitzt, es besteht die Gefahr, dass das Gerät zerstört wird und ggf. zu brennen beginnt.
Unter Berücksichtigung einer reduzierten Einschaltdauer kann ein Elektromagnet unter Verwendung einer geeigneten Ansteuerung (Haltestromabsenkung) übererregt werden. Mehr Informationen finden Sie in der Teilliste ZKDH.
Ändert sich die Bewegungsrichtung eines Elektromagneten indem die Polung an den Anschlüssen getauscht wird?
Nein.
Wird die Polung getauscht, ändert sich im Elektromagneten zwar die Richtung der elektromagnetischen Durchflutung, die Bewegungsrichtung des Ankers bleibt aber gleich, weil sich die Richtung der Kraftwirkung im Luftspalt nicht ändert.
Dies ändert sich, sobald im magnetischen Kreis ein Permanentmagnet eingebaut ist. Man spricht in diesem Fall von einem polarisierten Magnetsystem. Bei polarisierten Elektromagneten muss somit auf den polungsrichtigen Anschluss geachtet werden.
Welche elektrische Leistung benötigt der Elektromagnet?
Die erforderliche elektrische Leistung (W) ist im Technischen Datenblatt abhängig von der relativen Einschaltdauer angegeben. Der zugehörige Strom ist aus der Nennspannung und der Nennleistung zu errechnen.
Worin bestehen die Unterschiede zwischen Proportional- und Schaltmagnet?
Rein äußerlich sind zwischen Proportional- und Schaltmagnet keine Unterschiede zu erkennen. Die Unterschiede liegen in der Kennlinienform, in der Präzision von Lagerung und magnetischem Kreis sowie in der elektrischen Ansteuerung. Während mit einem Proportionalmagnet eine Lageregelung aufgebaut werden kann, die es ermöglicht Hubpunkte wiederkehrend und wiederholgenau anzufahren, ist ein Schaltmagnet dazu bestimmt, die Endlagen ohne Zwischenpositionen anzufahren.
Warum kann ich mit einem Standard-Hubmagneten keine Lageregelung realisieren?
Hubmagnete unseres Standardprogramms sind in der Regel Schaltmagnete mit ansteigender Kennlinie. Diese Kennlinie eignet sich nicht zur Realisierung einer Lageregelung.
Ein Schaltmagnet ist für seine Nennspannung ausgelegt. Der Strom welcher durch die Spule fließt, ist abhängig vom Widerstand der Spule, dieser wiederum ändert sich mit der Temperatur der Spule. Deshalb ist die erforderliche Wiederholgenauigkeit für eine Lageregelung nicht gewährleistet.
Grundlagen Elektromagnete
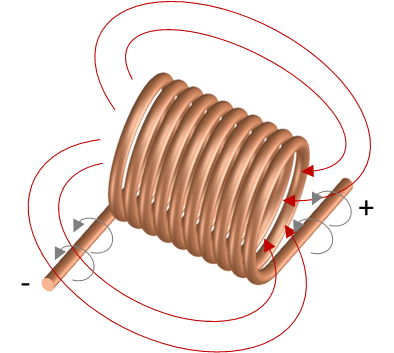
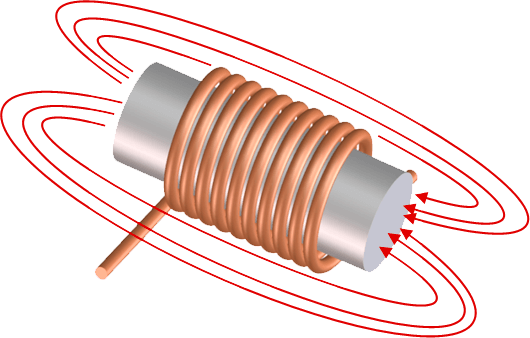
Liegt an einer Spule eine elektrische Spannung an, so fließt abhängig von der Höhe der Spannung und dem elektrischen Widerstand ein elektrischer Strom.
Dieser Strom erzeugt in der Spule ein Magnetfeld, dieses ist im Bild durch die roten Feldlinien dargestellt.
Die Spule wird üblicherweise aus lackisoliertem Kupferdraht hergestellt, da Kupfer eine sehr gute elektrische Leitfähigkeit aufweist. Bei extrem großen Spulen wird im Sonderfall zur Gewichts- oder Kostenreduktion auch Aluminium als Leiterwerkstoff verwendet.
Die Ausbreitung des Magnetfeldes hängt sehr stark vom Material und dessen Form ab, durch welches das Magnetfeld fließt.
So bringt Luft dem Magnetfeld einen vergleichsweise hohen Widerstand entgegen, während Eisenwerkstoffe wie Stahl eine hohe magnetische Leitfähigkeit aufweisen und das Magnetfeld sehr gut leiten.
Aus diesem Grund wird das Magnetfeld der Spule in Stahlbauteilen geführt. Vereinfacht spricht man auch davon, dass das Magnetfeld durch Stahlbauteile verstärkt wird. Richtigerweise findet dort aber keine Verstärkung statt, vielmehr wird das Magnetfeld durch die gute magnetische Leitfähigkeit von Eisenwerkstoffen nur in sehr geringem Maße geschwächt.
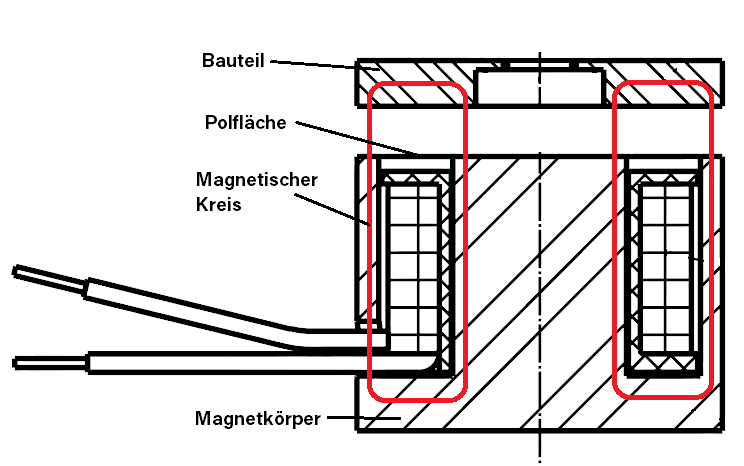
Die einfachste Form eines Elektromagneten ist der Haftmagnet, Haltemagnet auch Topfmagnet. Der magnetische Kreis besteht aus einem topfförmigen Magnetkörper mit Innenpol, der die Spule an 3 Seiten umschließt. Die Kraft, die mit diesem Gerät auf ein magnetisches Bauteil ausgeübt werden kann, nimmt mit der Entfernung des Bauteils zur sogenannten Polfläche sehr schnell ab.
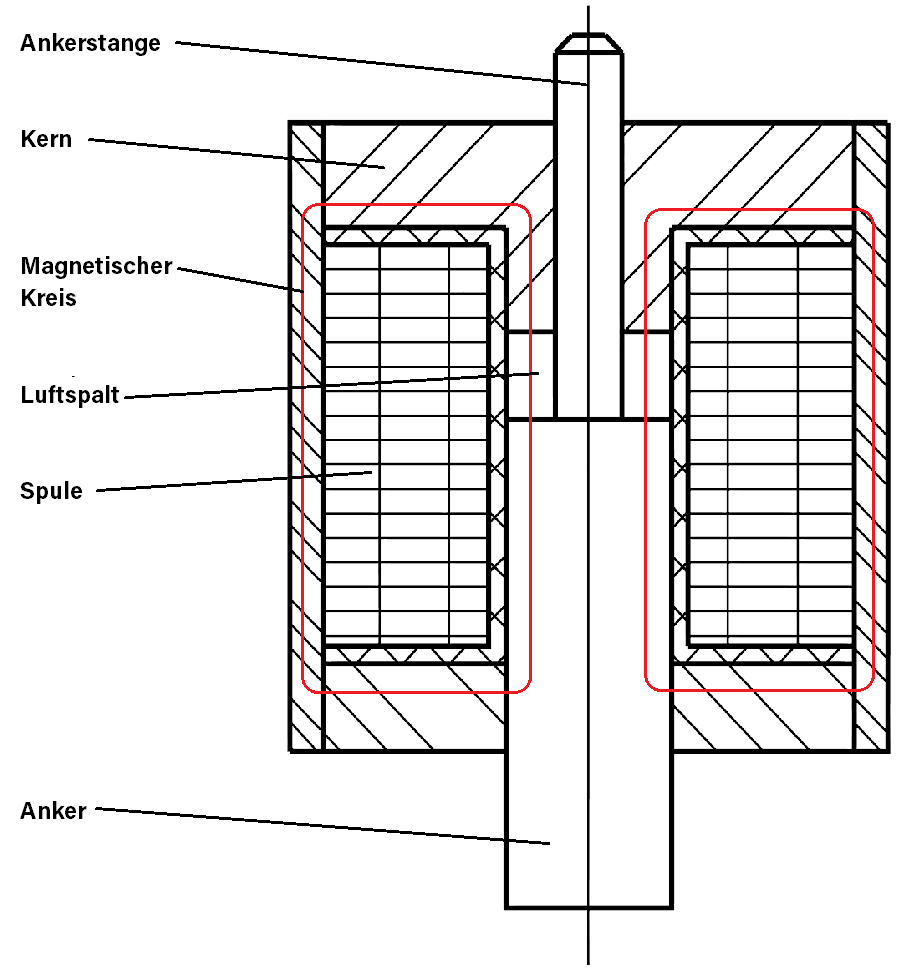
Soll der Elektromagnet eine Aufgabe als Linearaktor oder Hubmagnet übernehmen, sind in der Regel möglichst hohe Kräfte bei möglichst großen Hüben gefragt.
Dazu wird ein bewegliches Eisenteil (Anker) innerhalb der Spule mit einem Abstand (Luftspalt) zum feststehenden Kern angeordnet.
Wird die Spule mit Strom beaufschlagt, bewegt sich der Anker Richtung Kern und führt den Hub mit dem Maß des Luftspaltes aus. Die Bewegung des Ankers kann beispielsweise über eine Ankerstange durch eine Bohrung im Kern aus dem Elektromagneten herausgeführt werden.
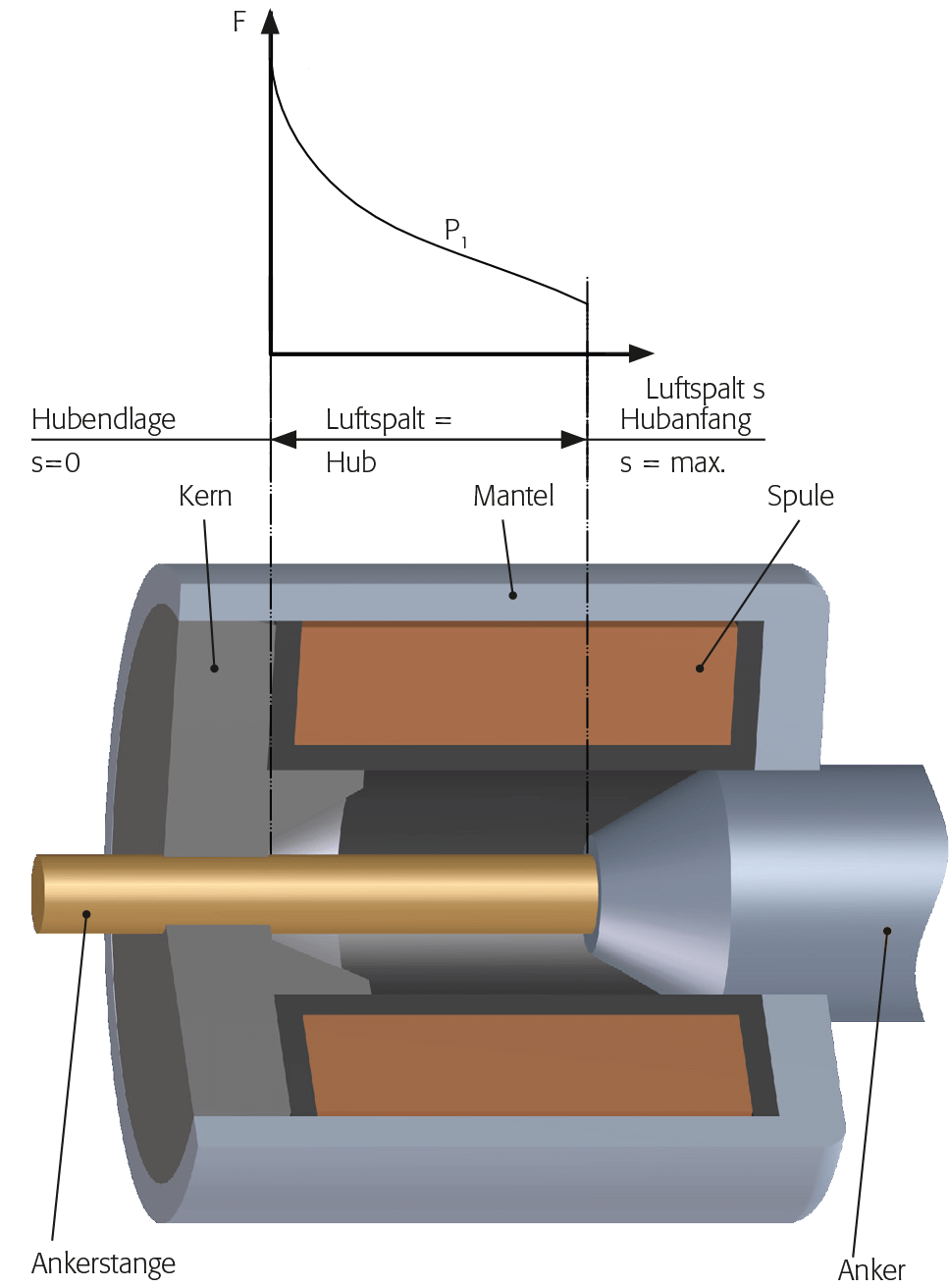
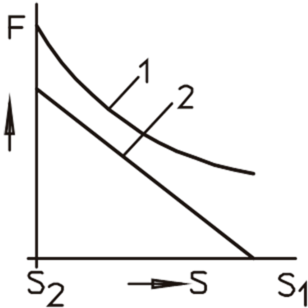
Magnetkraft und Hub sind beim Elektromagneten für die Auswahl entscheidende Größen, die in gegenseitiger Abhängigkeit stehen.
Das Bild links zeigt einen Hubmagnet im Schnitt und darüber den Kraftverlauf über den Hub bzw. Luftspalt.
Die Form der Kennlinie wird durch die konstruktive Gestaltung von Kern und Anker bestimmt und lässt sich durch moderne Berechnungstools (Finite Element Method) sehr genau abschätzen. Die Feinabstimmung erfolgt nach wie vor durch Geometrieanpassungen an Mustergeräten.
Mechanische Kenngrößen Hubmagnete
Exemplarisch für andere Formen von Elektromagneten sollen an dieser Stelle die wichtigen mechanischen Kenngrößen für Hubmagnete vereinfacht erläutert werden. Weitere detaillierte Informationen finden Sie zum Download in unserer Technischen Erläuterung.
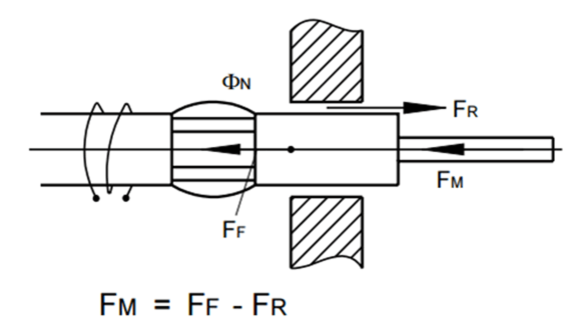
Die Magnetkraft FM ist der ausnutzbare, also um die Reibung verminderte Teil, der im Hubmagneten in Hubrichtung erzeugten mechanischen Kraft bei waagrechter Ankerlage.
ΦN = Nutzfluss (Wb)
FR = Reibungskraft (N)
FM = Magnetkraft (N)
FF = Kraft, die das magnetische Feld auf den Anker ausübt (N)
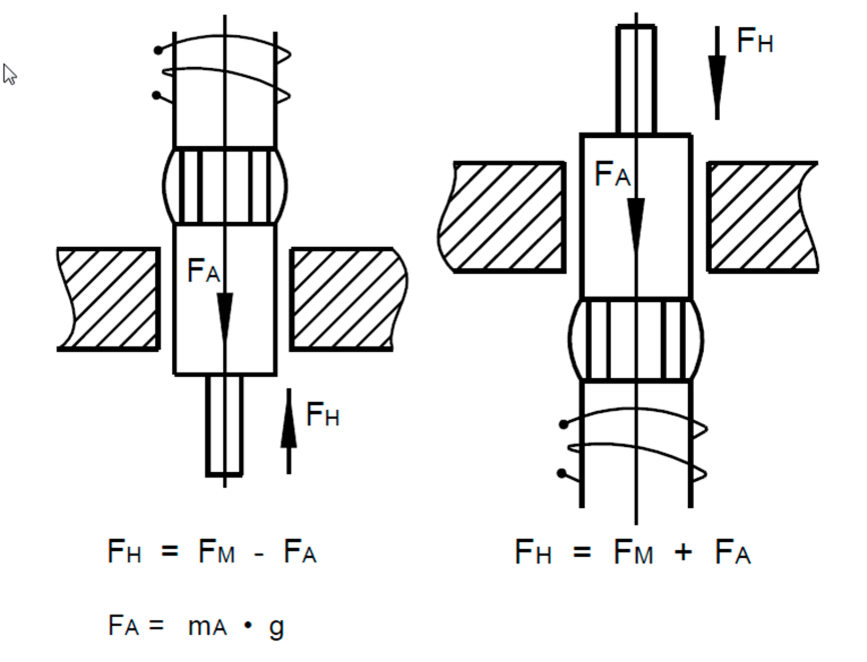
Die Hubkraft FH ist die Magnetkraft, welche unter Berücksichtigung der zugehörigen Komponente des Ankergewichtes FA nach außen wirkt.
FA = Gewichtskraft des Ankers (N)
mA= Ankermasse (kg)
g = 9,81 m/s²
Die Haltekraft ist die Magnetkraft in Hubendlage, also bei Hub 0. Das bewegliche Bauteil, der Anker, liegt am Kern an, der Luftspalt geht gegen 0. In der Regel stellt die Haltekraft das Maximum der Magnetkraft- Hub-Kennlinie dar.
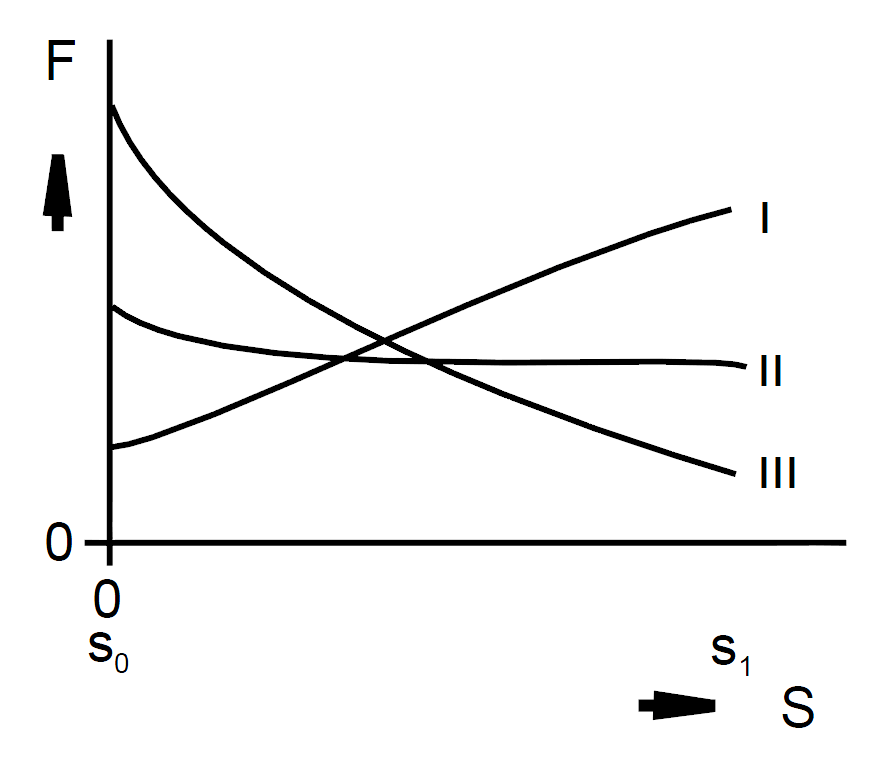
Durch die geometrische Gestaltung von Anker und Kern sind drei grundsätzlich verschiedene Arten von Kennlinien erreichbar.
I. fallende Kennlinie
II. waagrechte Kennlinie
III. ansteigende Kennlinie
Am gebräuchlichsten sind die ansteigende Kennlinie (III), besonders geeignet für Feder-Gegenkräfte, und die waagrechte Kennlinie (II), besonders geeignet für konstante Gegenkräfte.
Die fallende Kennlinie (I) ist für Hubmagnete selten gebräuchlich. Anwendungsbereiche sind dort, wo gegen große Reibungskräfte gearbeitet werden soll.
Die Hubarbeit W ist als das Integral der Magnetkraft über dem Magnethub definiert.
Vereinfacht ausgedrückt entspricht die Hubarbeit der Fläche unterhalb der Magnekraft-Hub-Kennlinie.
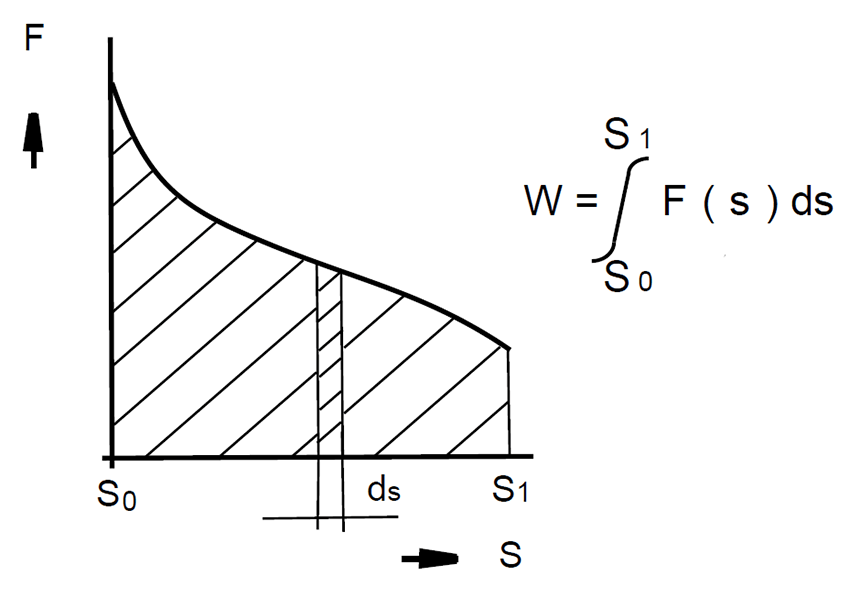
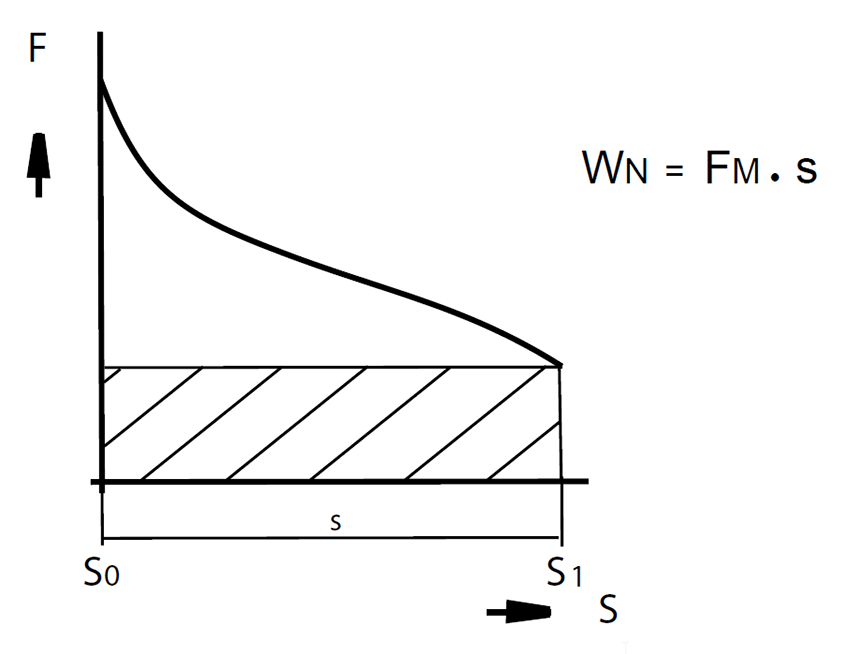
Die Nennhubarbeit WN, die in den Geräteblättern angegeben ist, errechnet sich als Produkt aus Magnetkraft FM in der Hubanfangslage s1 und dem Magnethub s.
Soll für eine neue Anwendung anhand vorhandener Vorgaben zu Hub und Magnetkraft ein Elektromagnet ausgewählt werden, so kann über die errechnete Nennhubarbeit durch Vergleich mit den Werten in Datenblättern eine Magnetbaugröße in Abhägingkeit der Betriebsart überschlägig ermittelt werden. Wenden Sie sich hierzu im Bedarfsfall an das für Sie zuständige Technische Büro.
Elektrische Kenngrößen Elektromagnete
Im Folgenden werden wichtige elektrische Kenngrößen für Gleichstrom-Magnete erläutert. Spannungs- und Stromangaben sind, sofern nichts anderes angegeben, bei Gleichstrom arithmetische Mittelwerte.
Die Nennspannung UN ist die Spannung für die ein Spannungsgerät ausgelegt ist und mit der es gekennzeichnet wird. Den in den Geräteblättern angegebenen Werten liegt, wenn nichts anderes angegeben, eine Nennspannung von 24 V zugrunde. Bei anderen Nennspannungen können durch die unterschiedlichen Isolationsanteile in den Erregerwicklungen Abweichungen von den angegebenen Magnetkräften, sowohl nach oben (meist bei > 24 V) als auch nach unten (meist bei < 24 V), auftreten.
Die dauernd zulässige Spannungsänderung an Gleichstrommagneten beträgt ±10 % der Nennspannung.
Der Bemessungsstrom IB ist der Strom, der sich bei Nennspannung und einer Temperatur der Erregerwicklung von +20° C einstellt. Er kann durch Division der in den Geräteblättern angegebenen Nennleistung durch die Nennspannung ermittelt werden.
Der Prüfstrom IPR ist der Strom, auf den sich die in den Geräteblättern genannten Magnetkraftwerte beziehen.
Er ergibt sich aus:
IPr = 0,9 UN / RW
wobei RW für den betriebswarmen Widerstand der Erregerwicklung steht.
Der Faktor 0,9 berücksichtigt die aufgrund der zulässigen Spannungstoleranz kleinste zulässige Versorgungsspannung.
Die Nennleistung PN, die in den Geräteblättern angegeben ist, bezieht sich auf die Nennspannung und den Bemessungsstrom. Da der Bemessungsstrom bei einer Temperatur von +20°C zugrunde gelegt ist, wird die Nennleistung bei MSM mit P20 benannt. Wenn nichts anderes angegeben, wird hierbei eine Nennspannung von 24V zugrunde gelegt.
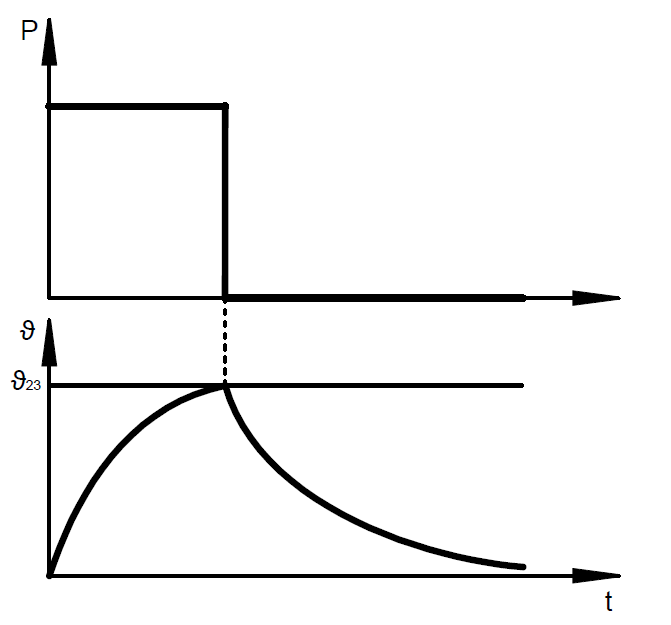
Thermisches Verhalten und Betriebsart
Der elektrische Widerstand der Magnetspule bedingt, dass sich ein Elektromagnet erwärmt, sobald dieser mit Spannung beaufschlagt wird. Die maximale Temperatur (Beharrungstemperatur) in der Spule ist dann erreicht, wenn die durch elektrische Energie zugeführte Wärme der durch Wärmestrahlung und Wärmeleitung abgeführten Wärmemenge entspricht und sich ein thermisches Gleichgewicht einstellt.
Wird eine höhere elektrische Leistung zugeführt, erhöht sich die Magnetkraft und es stellt sich eine höhere Wicklungstemperatur (Beharrungstemperatur) ein.
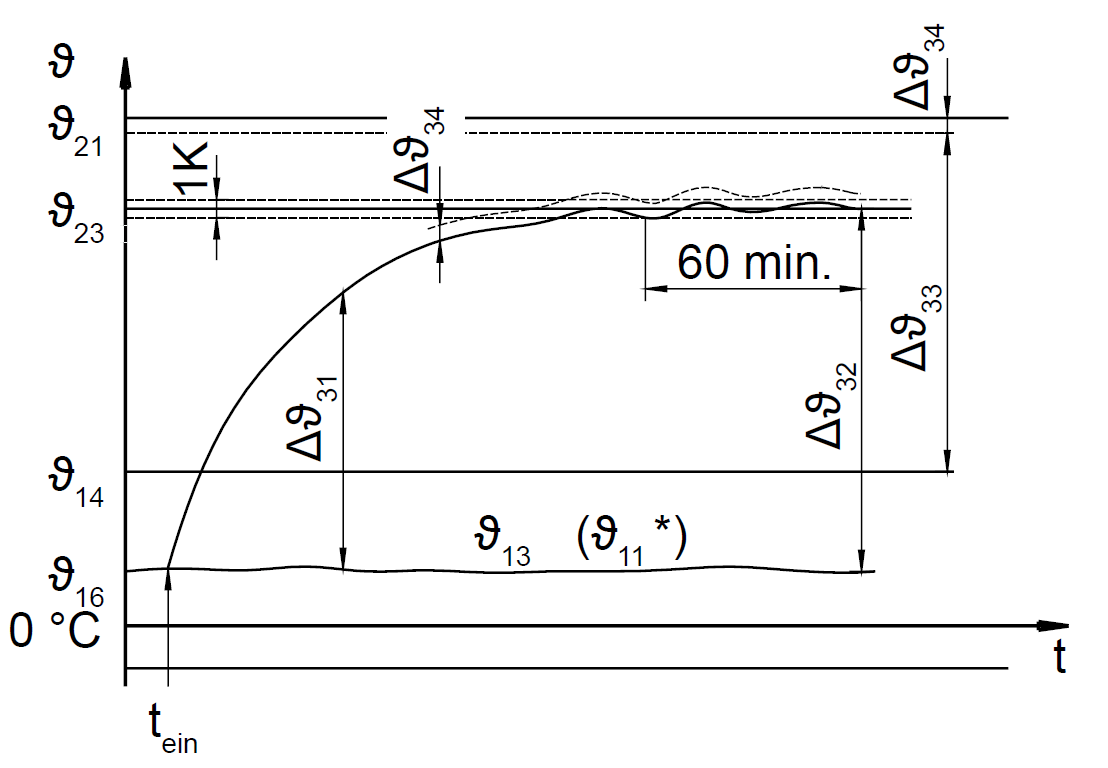
Bei der werksseitigen Wicklungsauslegung von Elektromagneten wird unter Berücksichtigung der Umgebungsbedingungen und der Betriebsart darauf geachtet, dass die Temperatur der Wicklung unterhalb der zulässigen maximalen Temperatur für die Isolierwerkstoffe liegt.
ϑ13 Umgebungstemperatur am Ende der Messung
ϑ11 Bezugstemperatur (Berücksichtigung von Temperatureinflüssen von Medien)
ϑ14 obere Umgebungstemperatur
ϑ16 Anfangstemperatur bei Beginn der Messung
ϑ21 obere Grenztemperatur
ϑ23 Beharrungstemperatur
Δϑ31 Übertemperatur
Δϑ32 Beharrungsübertemperatur
Δϑ33 Grenzübertemperatur
Δϑ34 Heißpunktdifferenz
tein Einschaltzeitpunkt
Elektromagnete werden je nach Anforderung für verschiedene Betriebsarten ausgelegt.
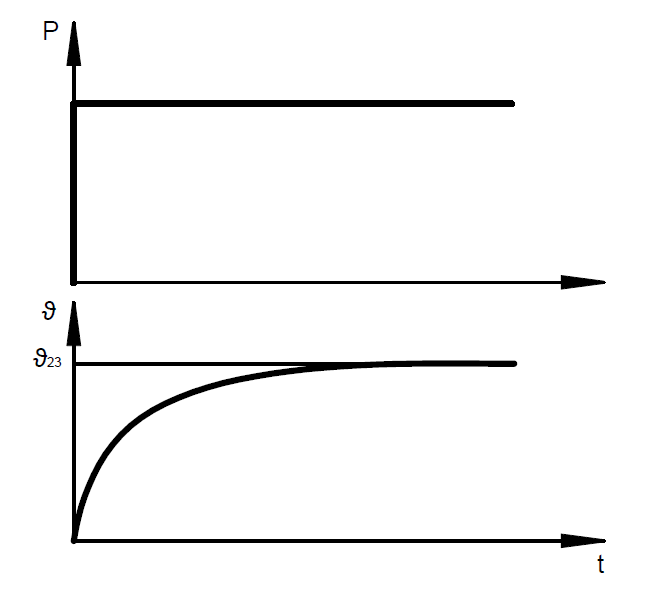
Im Dauerbetrieb (S1 oder 100% ED) ist die Einschaltdauer so lange, dass die Beharrungstemperatur ϑ23 praktisch erreicht wird.
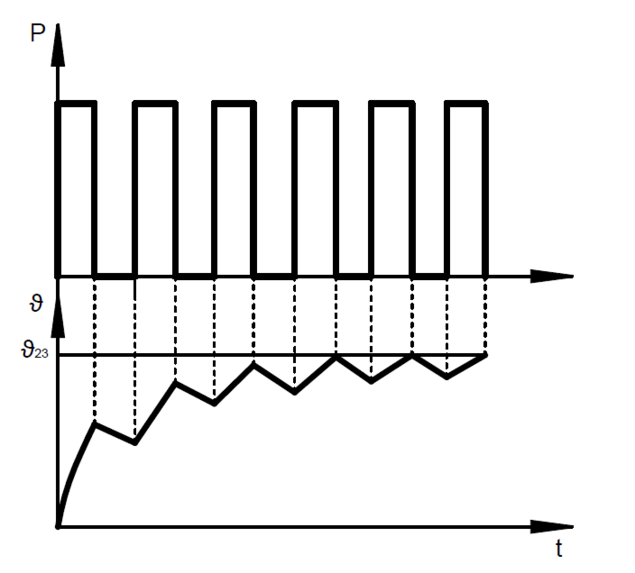

Im Aussetzbetrieb (S3) wechseln Einschaltdauer und stromlose Pause in regelmäßiger oder unregelmäßiger Folge, wobei die Pausen so kurz sind, dass sich das Gerät nicht auf seine Bezugstemperatur bzw. Ausgangstemperatur abkühlt.
Die zulässige Einschaltdauer wird in % angegeben und errechnet sich wie folgt:
%ED = Einschaltdauer / Spieldauer * 100
t5 = Einschaltdauer
t6 = stromlose Pause
tS = Spieldauer
Die in den Geräteblättern von Elektromagneten angegebenen Kraft-, Leistungs-, und Zeitwerte beziehen sich auf eine Spieldauer von 5 Minuten (300 Sek.) Für diese Spieldauer ergeben sich folgende zulässige Maximalwerte für die Einschaltdauer gemäß der links stehenden Tabelle.
Im Kurzzeitbetrieb (S2) ist die Einschaltdauer so kurz, dass die Beharrungstemperatur nicht erreicht wird. Die stromlose Pause ist so lange, dass sich das Gerät praktisch auf die Bezugstemperatur abkühlt.
Der Kurzzeitbetrieb wird gekennzeichnet durch die Angabe der Einschaltdauer
z.B. „S2 20s“.
Arten von Elektromagneten
Elektromagnete werden nach verschiedenen Kriterien unterschieden und klassifiziert. In der folgenden Betrachtung sind die Kriterien einzeln beschrieben, in der Praxis zeigen sich Kombinationen.


Bei den Bauformen unterscheidet man für alle Arten von Elektromagneten zwischen
geschlossener Bauform,
der Magnetkörper oder eine andersartige Umhüllung umschließt die Erregerwicklung allseitig,
und
offener Bauform,
hier wird die Erregerwicklung nur teilweise umschlossen.
Je nach Art der Bewegung eines Elektromagnets spricht man von:
- Hubmagneten, diese führen lineare Bewegungen aus.
- Verriegelungseinheiten als eine Sonderform der Hubmagnete. Die Ankerstange ist besonders stabil ausgeführt, deshalb können Querkräfte aufgenommen werden.
- Drehmagneten für Drehbewegungen über einen begrenzten Winkel (max. 110°)
- Haftmagneten, sie erzeugen ein Magnetfeld das auf ein ferromagnetisches Gegenstück Anziehungskräfte ausübt
- Schwingmagneten zur Erzeugung von kleinen Hubbewegungen, die Feder-Masse-Systeme in Schwingungen versetzen können.
Wenn nichts anderes angegeben ist, sind Elektromagnete Schaltmagnete. Soll die Kraft eines Elektromagneten geregelt werden, führt man diesen als Proportionalmagneten aus. Diese Unterteilung findet sich in erster Linie im Bereich der Hydraulik. Aber auch Pneumatikventile werden teilweise mit Proportionalmagneten betrieben.
Schaltmagnete sind dazu ausgelegt, den Anker nach Bestromung in die Endlage zu bewegen.
Die üblicherweise ansteigende Kennlinie eignet sich gut um gegen eine Feder zu arbeiten, da diese ebenfalls eine ansteigende Charakteristik besitzt.
Regelmagnete oder Proportionalmagnete werden durch geeignete konstruktive Maßnahmen mit einer waagrechten oder leicht fallenden Kennlinie ausgestattet.
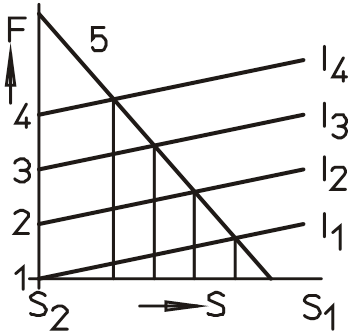
Die elektrische Ansteuerung erfolgt über eine Stromregelung.
Um die thermische Belastung zu begrenzen, wird der maximal zulässige Strom als sogenannter Grenzstrom IG angegeben. Die Stromregelung eliminiert die Einflüsse der temperaturabhängigen Widerstandsänderung der Spulenwicklung.
Die Magnetkraft lässt sich nun durch den Strom einstellen, der durch die Spule fließt. Arbeitet der Magnet gegen eine Kraft, fährt der Anker abhänging von der Gegenkraft auf einen bestimmten Hubpunkt.
Anwendungen in denen besondere Positioniergenauigkeiten gefordert sind, werden mit Positionssensoren ausgestattet. Diese ermöglichen den Aufbau eines Regelkreises. Damit kann eine gewünschte Hubposition exakt erreicht und gehalten werden.
Erläuterung der Gerätearten
Je nach der Art des Bewegungszyklus wird unterschieden zwischen Einfach-, Doppel-, und Umkehrhubmagnet.
Einfach-Hubmagnete sind Elektromagnete, bei denen die Bewegung von der Anfangslage in die Endlage durch elektromagnetische Kraftwirkung erfolgt. Für die Rückstellung in die Ausgangslage ist eine äußere Kraft erforderlich, z.B. Federkraft, Gewichtskraft usw.
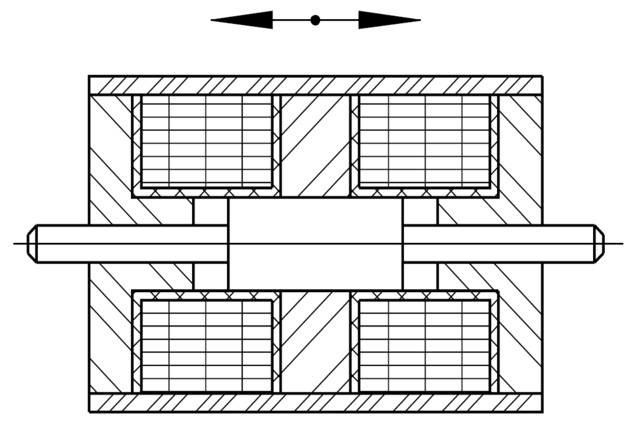
Doppel-Hubmagnete (mit Nullstellung) sind Elektromagnete, bei denen die Bewegung nach Erregung der relevanten Spule von der Nullstellung aus in eine der beiden entgegengesetzten Richtungen erfolgt. Die Rückstellung in die Nullstellung erfolgt nach Ausschalten durch äußere Rückstellkräfte. Die Nullstellung ist die Anfangslage für beide Richtungen.
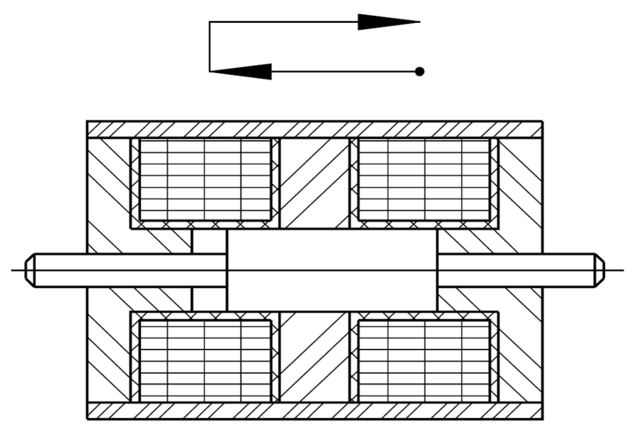
Umkehr-Hubmagnete (ohne Nullstellung) sind Elektromagnete bei denen die Bewegung nach Erregung der relevanten Spule von einer Endlage in die andere oder umgekehrt erfolgt.


Elektromagnete die eine rotative Bewegung ausführen, werden als Drehmagnete bezeichnet.
Bei Drehmagneten ist die einfachwirkende Ausführung am meisten verbreitet.
Ist eine Rückstellbewegung erforderlich, so wird über einen passenden Federkäfig eine Rückstellfeder adaptiert.
Grundsätzlich ist analog zu den Hubmagneten eine Ausführung als Umkehrdrehmagnet mit 2 gegeneinander arbeitenden Drehmagneten realisierbar.
Haltemagnete sind Elektromagnete die in der Regel keinen oder nur einen sehr geringen Hub ausführen.
Je nach Funktionsart wird das Gegenstück im bestromten oder im unbestromten Zustand durch ein Magnetfeld angezogen.
Haltemagnete bauen ein Magnetfeld auf, solange Sie mit der Spannungsversorgung verbunden sind.
Permanet-Haftmagnete ziehen magnetische Gegenstücke ständig an. Das Magnetfeld wird durch einen integrierten Permanentmagneten erzeugt. Werden die Geräte mit der Spannungsversorgung verbunden, wird dieses Magnetfeld durch das Magnetfeld der zusätzlich eingebauten Spule weitgehend neutralisiert.

Vorteile von Elektromagneten
Elektromagnetische Systeme stehen grundsätzlich im Wettbewerb zu einer Vielzahl von andersartigen Aktoren wie beispielsweise:
- Elektromotorische Antriebe mit Spindel, Getriebe oder Kurbelschleife
- Elektromechanische Zylinder
- Pneumatische Antriebe bestehend aus Zylinder und Ventil
- Piezoaktoren
- Voice Coil Aktoren
- Magnetostriktive Stelleinheiten oder Translatoren
- Stellantriebe mit Formgedächtnismetallen
- Stellantriebe mit Thermobimetallen
Der elektromagnetische Aktor weist folgende qualitativen Vorteile auf:
- Schnelle Bewegung mit hoher Dynamik
- Hohe Kräfte
- Geringer technischer Aufwand im Vergleich zu einer elektromotorischen Lösung:
- Einfache elektrische Ansteuerung
- Keine mechanische Schnittstelle (Getriebe, etc.) erforderlich
- Fester Hub
- Großer Arbeitstemperaturbereich
- Geringe Anzahl beweglicher Teile
- Geringe Störungsemfindlichkeit
- Hohe Schutzarten und Explosionsschutz nach ATEX/IECEx möglich
- Hohe Lebensdauer
- Wartungsfrei
- Große Typenvielfalt
- Standardgeräte ab Lager verfügbar
Auszeichnungen
Die höchste Auszeichnung ist für uns die Zufriedenheit und der Erfolg unserer Kunden. Supplier Awards unterstreichen die Wirksamkeit unserer Bemühungen und sind uns Ansporn für neue Höchstleistungen.






Häufige Fragen zu Elektromagneten
Worin besteht der Unterschied zwischen einem ziehenden oder einem drückenden Elektromagneten?
Wie wird ein Elektromagnet für Gleichstrom angeschlossen?
Der Elektromagnet erzeugt beim Abschalten eine Überspannung, wie lässt sich diese begrenzen?
Von welchen Größen hängt die Kraft eines Elektromagneten ab?
Der Elektromagnet erwärmt sich im Dauerbetrieb. Ist das eine Fehlfunktion?
Was bedeutet der Begriff Einschaltdauer?
Wie lässt sich die Eigenerwärmung eines Elektromagneten reduzieren?
Der eingesetzte Elektromagnet ist zu schwach. Wie gehe ich vor?
Mit welcher Spannung wird ein Elektromagnet betrieben?
Welche elektrische Leistung benötigt der Elektromagnet?
Worin bestehen die Unterschiede zwischen Proportional- und Schaltmagnet?
Warum kann ich mit einem Standard- Hubmagneten keine Lageregelung realisieren?
 +49 8331 1040
+49 8331 1040 info@magnet-schultz.com
info@magnet-schultz.com